Llega el momento de realizar el broche final a los proyectos sobre diseño de una vivienda autosuficiente / domótica realizado por los alumnos de 1º Bachillerato, siguiendo las siguientes premisas recibidas durante todo el curso y tras la exposición del desarrollo de cada uno de los apartados (ASPECTOS GENERALES, DISEÑO, ENERGÍA, ADAPTABILIDAD,...) llega el momento del análisis de los distintos tipos de sensores para implementarlo en la casa domótica.

1. PROYECTO VIVIENDA AUTOSUFICIENTE DOMÓTICA 2021/22_01. INFORMACIÓN PREVIA: ENERGÍA
02. INFORMACIÓN DOMÓTICA
03. ADAPTABILIDAD, AISLAMIENTOS, CARACTERÍSTICAS TÉCNICA
PRÁCTICAS TINKERCAD-ARDUINO**
**niveles iniciales de encendido de diodos leds y servomotores, así como la simluación de alguno de los sensores analizados posteriormente (LDR, PIR o presencia,...). Nivel 1º Bachillerato (sensores casas domóticas) y nivel 4º ESO (control de diodos leds, servomotores,...)
**Para l@s alumn@s de 1º y 2º ESO se realizan las primeras prácticas en los talleres realizados tanto en la SEMANA AULA ABIERTA, como en la SEMANA TECNOTIC (ver enlaces).
1.1. SENSORIZACIÓN DE LA VIVIENDA (DOMÓTICA).
Todos los sensores trabajados con los alumn@s de TIN I se implementarán posteriormente a una maqueta construida durante el curso y que responden a una serie de estándares de diseño, propuestos previamente (ver punto anterior), en los cuales ha tenido cabida los conceptos de energía sostenible y adaptabilidad, enfocados ambos conceptos a tenerse en cuenta a la hora de realizar el esquema domótica y justificar así una serie de respuestas técnicas.
En todos los casos, se ha realizado primeramente la simulación del circuito en Tinkercad para posteriormente realizarlo en la placa física de Arduino, con lo resultados que expondremos a continuación.
Principalmente, se trabajan los siguientes sensores:
-
SENSOR DE PRESENCIA (PIR) (enlace ficha) en placa de arduino. En el apartado referido en el proyecto a la seguridad (Domótica) se plantea este sensor de presencia para controlar el espacio exterior de la vivienda.
-SENSOR DE LUZ (LDR). En la maqueta de la vivienda se pide que se realice un control de la cantidad de luz que incide en la vivienda (exposición futurible de paneles fotovoltaicos) y, además, que cada vez que no incida luz directa en el LDR (noche) se encienda una luz (diodo LED).
- SENSOR DE TEMPERATURA. Este sensor tendrá mucha importancia a la hora de analizar la temperatura de cada una de las estancias de la vivienda e incidir en un termostato. Se analizan los datos de salida en el monitor serie del programa IDE Arduino (printpantalla). Para realizar la prueba los alumnos de primero han observado los datos de temperatura cuando han interactuado con el sensor y cada vez que alcanzaba un valor se encendía un testigo (diodo LED).
-SENSOR DE HUMEDAD (TIERRA). Sensor fundamental al inicio de nuestro proyecto, ya que integra, además de la domótica de una vivienda autosuficiente (huerto propio), la humeda en el entorno de la vivienda y su posterior uso (irrigación, riego por goteo, pautar fertilización,...). Este análisis de datos, únicamente se ha podido realizar desde el punto de la humedad puntual de una prueba, llevando este punto al próximo curso 2022/23 al huerto del propio centro, en segundo de Bachillerato.
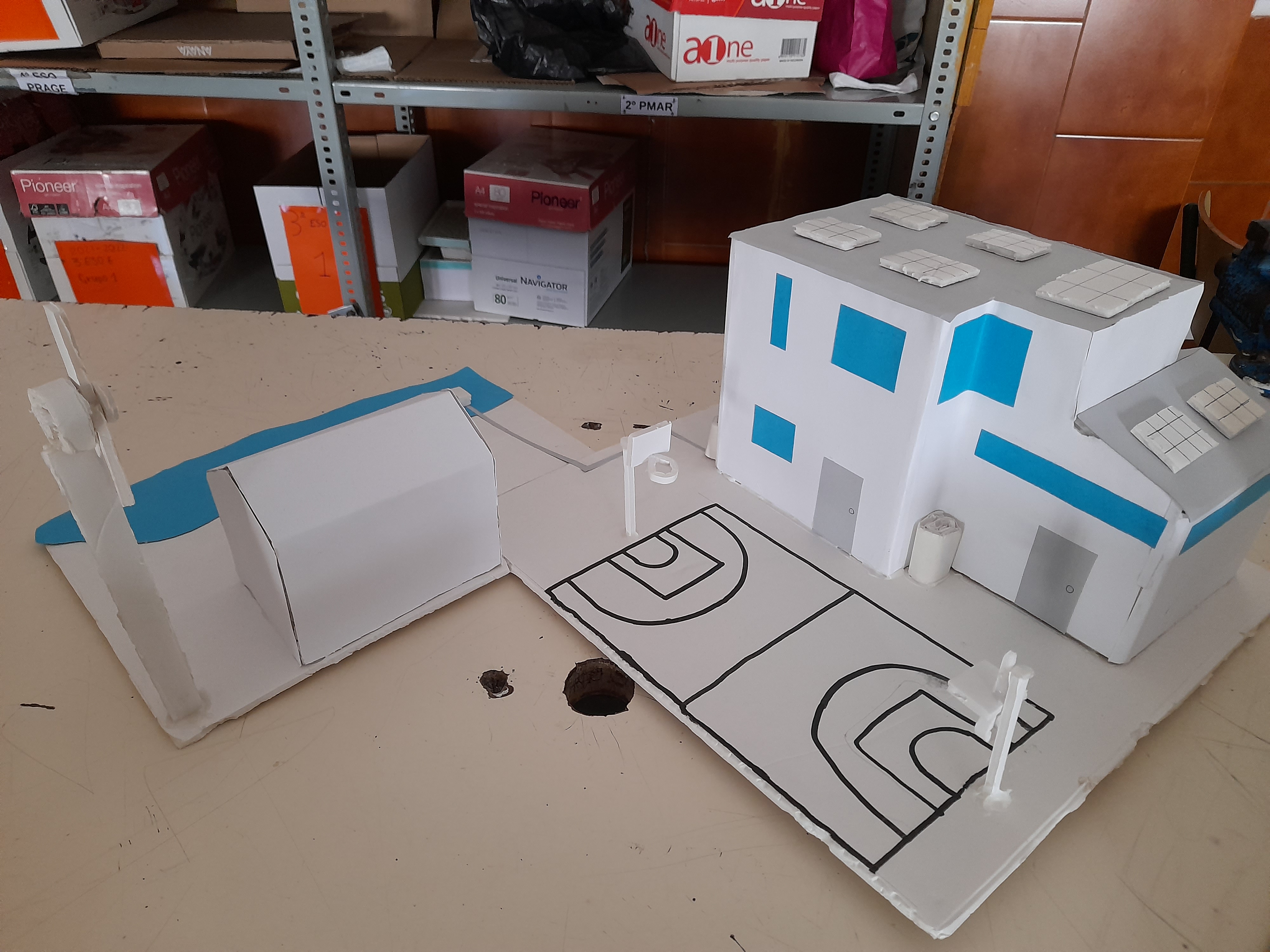
1.2.MAQUETAS DONDE SE IMPLEMENTARÁN LOS CIRCUITOS DE CONTROL CON ARDUINO.
A continuación se realiza la documentación fotográfica de los proyectos / maquetas de los diseños realizados en bocetos previos y el desarrollo a partir del dibujo técnico en Sketchup y Homebyme.
1. Construcción de maqueta previos diseños / bocetos previos (se jutifican dichos diseños en exposición oral)
2. Implementación de sensores (ver punto anterior)
3. Diseño y fabricación de elementos reales, con impresora 3D (TIN II)
















.jpg)